CPU Raytracer
A basic real-time raytracer on the CPU
Quick overview
About this project
For this project, we were tasked with creating a raytracer on
the CPU. The goal was to create a real-time raytracer where
primitive objects, like spheres and spheroids, can be rendered
in real time. Primitive objects can contain reflective and
refractive materials. In order to accomplish real-time
framerates (around 20fps), a custom BVH system was implemented,
as well as a multithreading system for spreading rendering
workload across multiple threads.
This is a solo student project made during my 1st year at Breda University of Applied Sciences.
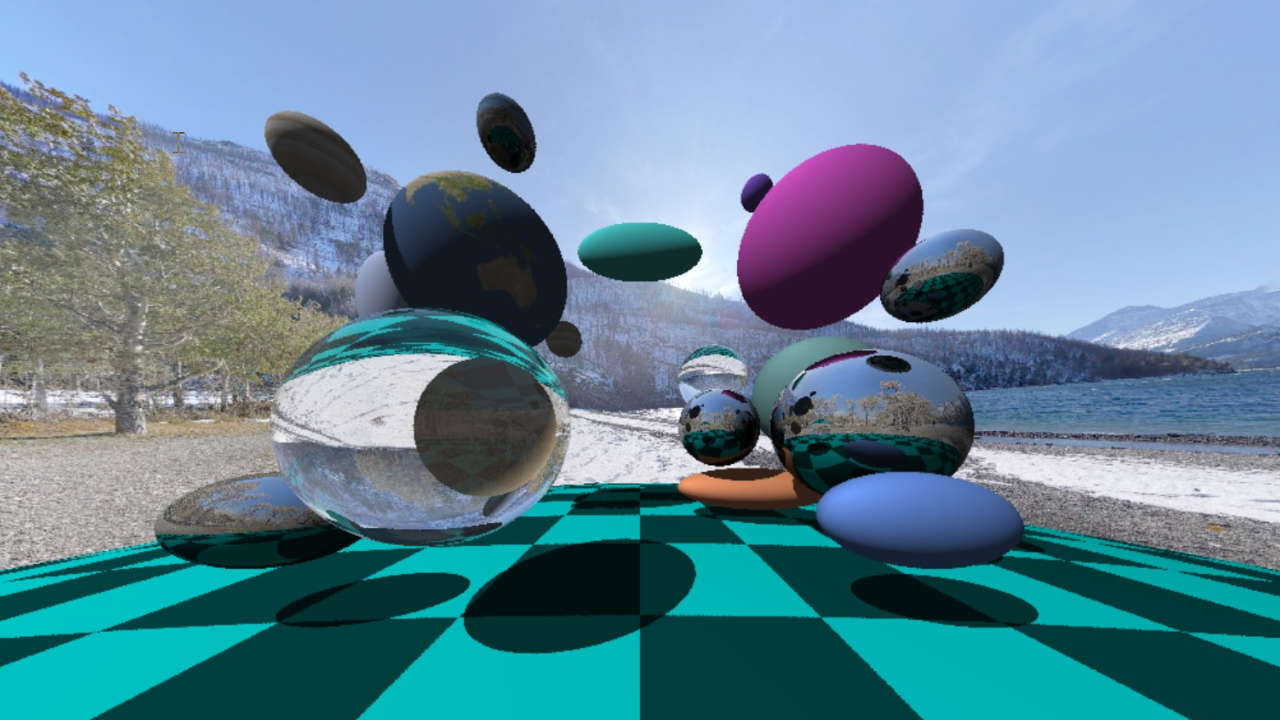 This screenshot demonstrates a level highlighting some of
the capabilities of my raytracer. It features spheres with
different materials, such as reflective and refractive
materials, as well as textured spheres.
This screenshot demonstrates a level highlighting some of
the capabilities of my raytracer. It features spheres with
different materials, such as reflective and refractive
materials, as well as textured spheres.
My contributions to the project
Since this is a personal project, everything has been done
by me. A brief list of systems that have been implemented
will be listed below:
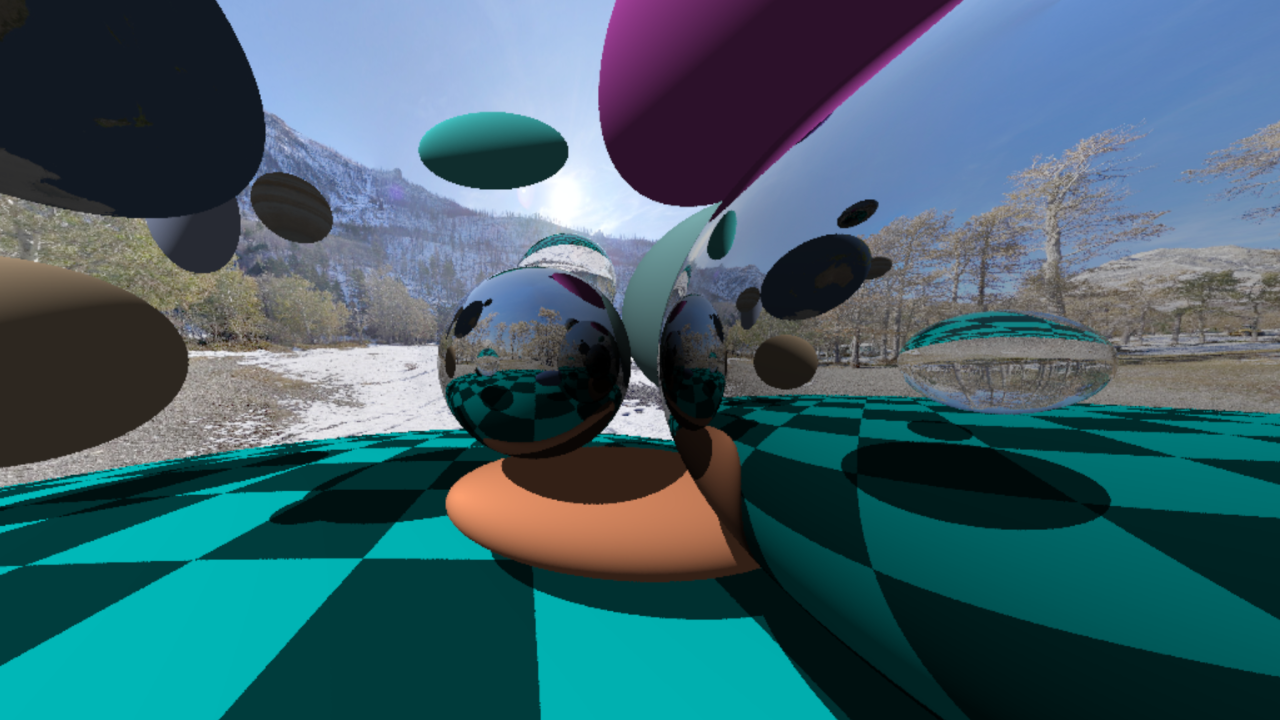 A close-up view of a sphere featuring a reflective
material. Within its reflection, another sphere with a
refractive material is visible.
A close-up view of a sphere featuring a reflective
material. Within its reflection, another sphere with a
refractive material is visible.
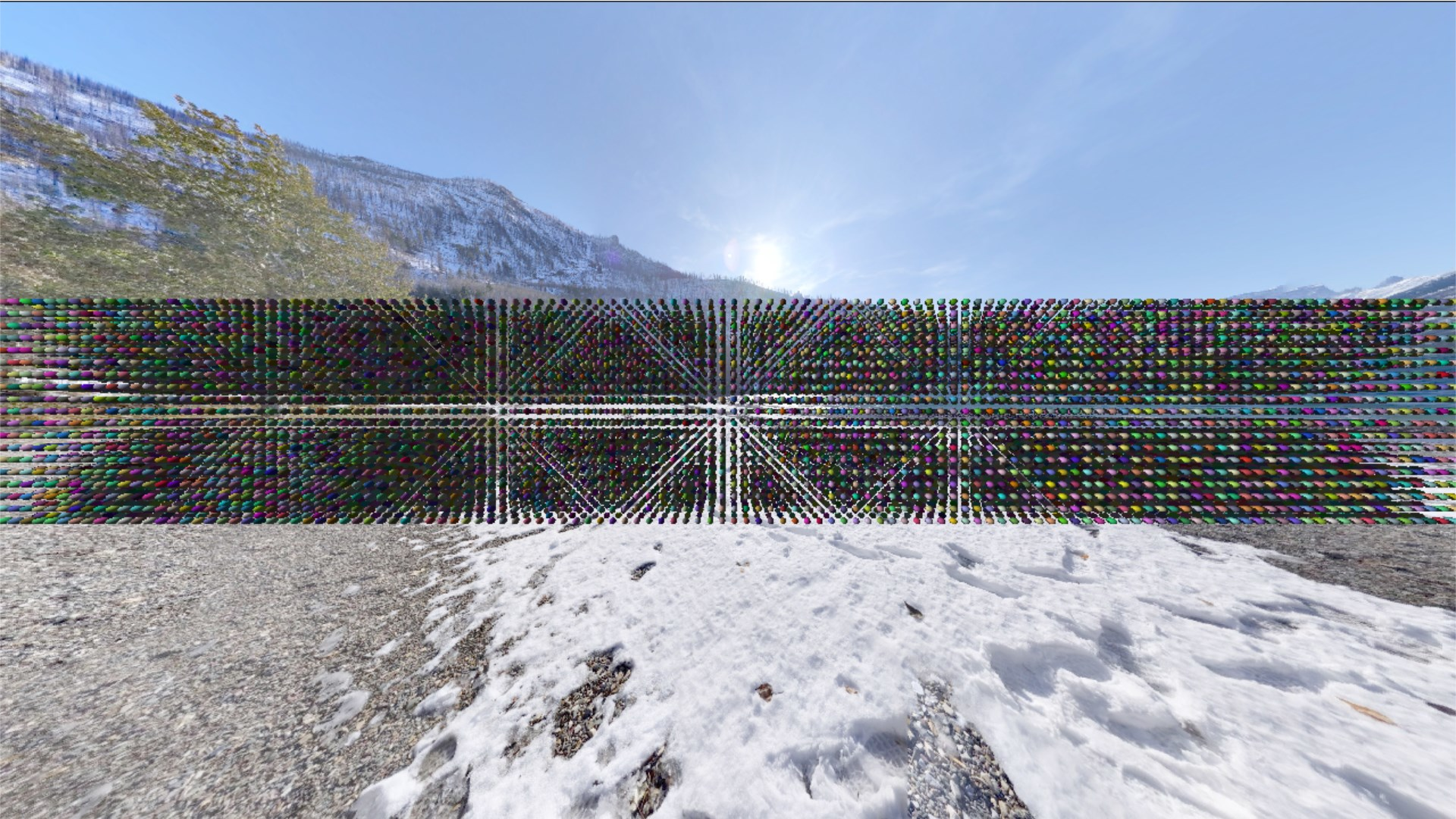 A screenshot demonstrating a level with 16.000
spheres.
A screenshot demonstrating a level with 16.000
spheres.
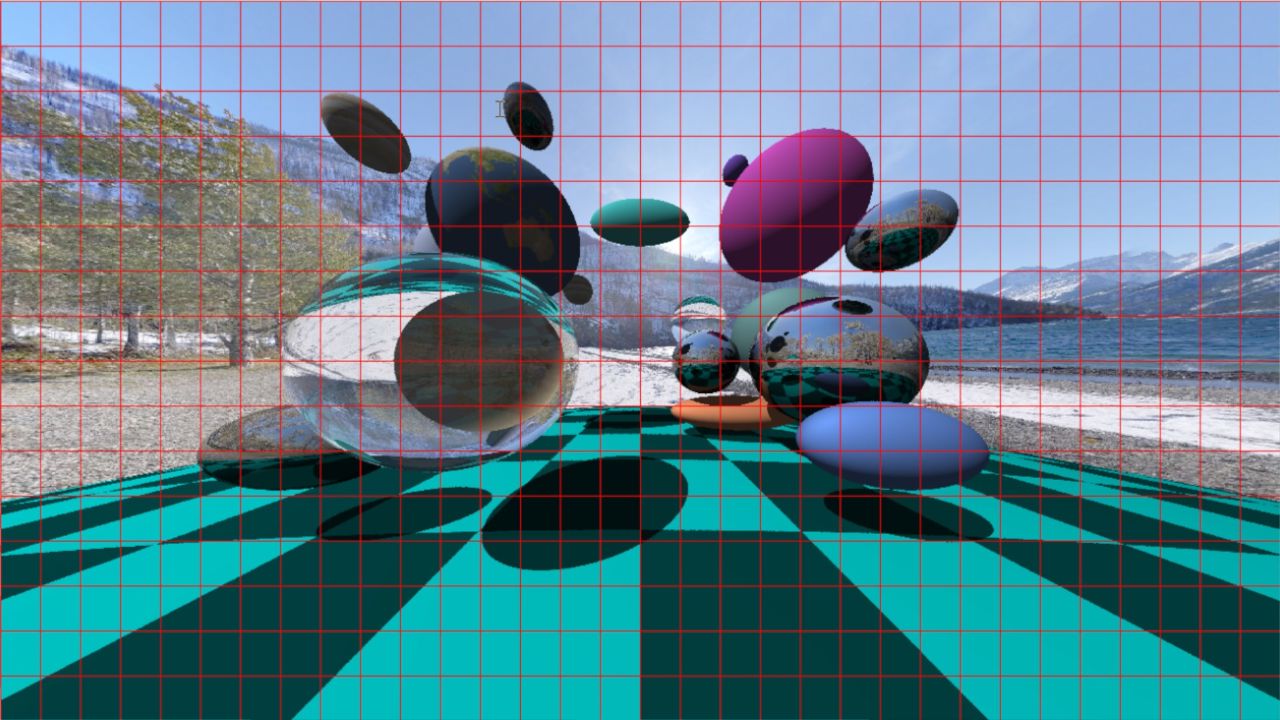 A screenshot demonstrating the multithreading of tiles
in the raytracing process. Each thread handles the
raytracing of a specific tile, and upon completion, it
proceeds to process another tile. This cycle continues
until all tiles are rendered, after which the process
starts over.
A screenshot demonstrating the multithreading of tiles
in the raytracing process. Each thread handles the
raytracing of a specific tile, and upon completion, it
proceeds to process another tile. This cycle continues
until all tiles are rendered, after which the process
starts over.
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.